「レジェンド」で自動化レベル3を体感した









試乗したプロトタイプはホンダが市販するフラッグシップセダン「レジェンド」をベースに各種装置を取り付けた車両(以下、レジェンド)で、高速道路や自動車専用道路上で自動化レベル3相当の自動走行が行える。
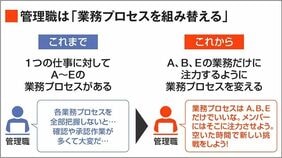
一般的に自動走行を行うシステムでは、A/自車位置の認識、B/自車周囲の外界認識、C/ドライバーの状態把握の3点が、システムを正しく稼働させる重要な情報源になる。A~Cの情報を受けたシステムでは、「どの進路を選択し、時速何㎞で走るのか」という行動計画をつくり出し、その計画を基に車両自身がアクセル操作やブレーキ操作、ステアリング操作を司り「車両制御」を行う。
自動で行う「追い越し運転」
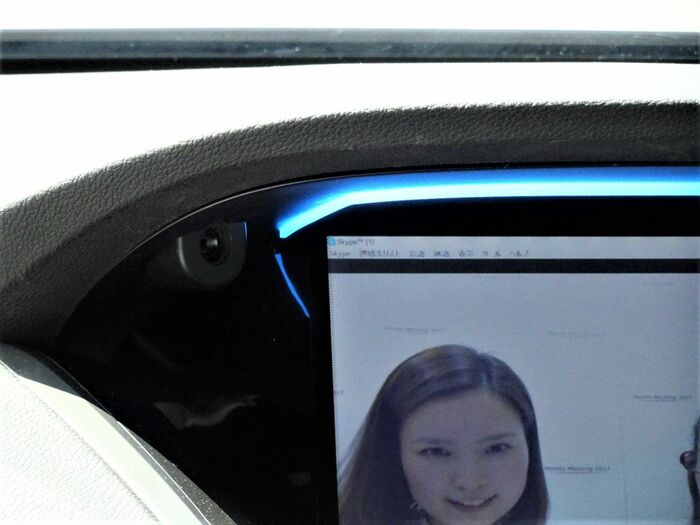
レジェンドの試乗は高速周回路で行われた。コースに入り定められたポイントを通過した時点でステアリング右上に配置された「AUTO」ボタンを押すことで自動走行モードに入る。同時にこれまで速度を表示していたセンターディスプレイが、走行車線や周辺車両、そして自車の進路を含めた3D表示画面に切り替った。
テストした自動走行システムは、カーナビゲーションで目的地を設定している際に機能する。自動走行状態に入るとすぐさまアクセルが徐々に踏み込まれドライバーが設定した車速100km/hを目指す。ボタン操作で設定速度まで加速する一連の流れはACCで慣れ親しんだもの。
周回路を走行中、進路上を走行する前走車に追いつき自動的に減速を開始した。一般的なACCであれば、あらかじめ設定した車間時間に基づいて減速され、その後、追従走行となるだけだが、今回は設定車速である100km/hをなるべく保ち、目的地に早く到着できるよう右側への車線変更を伴う「追い越し運転」を行った。
具体的にはこうだ。前走車に近づきながら、自車が搭載する外界センサーで周囲と、自車に接近してくる車両がいるかどうかを検出しながら、高精細地図(HDマップと呼ばれる高度情報地図データ)とのマッチングが1秒間に10回ほど行われる。
そして車線変更が可能である(≑危険な状態にならない)とシステムが判断すると、センターディスプレイには自車が右方向へと車線変更することを連続して右方向へと流れる水色の矢印で表示しながら、「車線変更をして追い越しを行うこと」が人工音声にて車内にいる“乗員”すべてに伝えられ、実際に追い越し運転が行われる。追い越し開始時の車速は60km/h、ここから追い越しをかけながら40km/h増速して100km/hを目指す。