これがKPCの仕組みや改良された最新型のロードスターだ
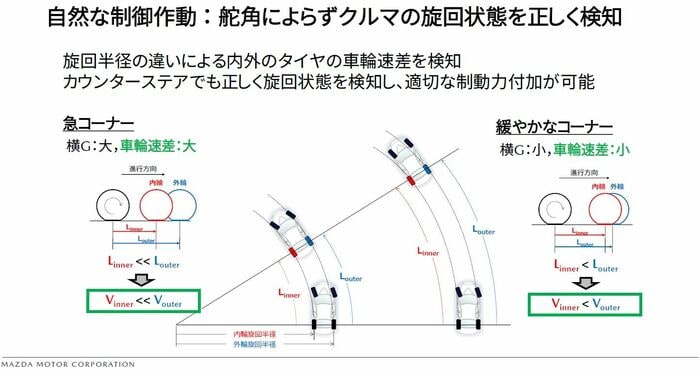













制御の概要はこうだ。まず、カーブを走行する際に発生する右後輪と左後輪の回転差(左右の車輪速差)から、車両の旋回状態をリアルタイムに検出する。次に、横Gが0.3以上になると制御をはじめ、カーブの曲率がきつくなっていくと緩いブレーキを掛けていくのだ。
具体的には、車輪のロックを抑制するABS用の車輪速センサーを活用して後輪左右の車輪速差(タイヤの回転差。カーブ内側輪は外側輪よりも回転が遅くなる)を検出し、パワートレーンコントロールモジュールのエンジンコントローラーを経由して、必要とされるブレーキ力を演算する。そして演算結果を、車両姿勢安定装置であるESCのブレーキコントロールユニットに送り内側の後輪(右カーブなら右後輪)にだけ、緩いブレーキを掛ける。
極めて緩いブレーキを掛ける効果は大きい
システムが自動的に掛けるブレーキは極めて緩く、制動力にしても非常に弱い。ブレーキパッドを押しつけるための液圧は最大で0.3MPaというから、ドライバーがブレーキペダルに軽く足をのせた程度の緩い制動力しか発しない。それでも、KPCは大きな効果を発揮する。
なぜか? 今度は別角度からKPCの狙いを説明しよう。走行中、ドライバーや同乗者の身体は走らせ方や路面状況を受けて、左右/上下/前後方向に持っていかれるが、これは車体も同じだ。

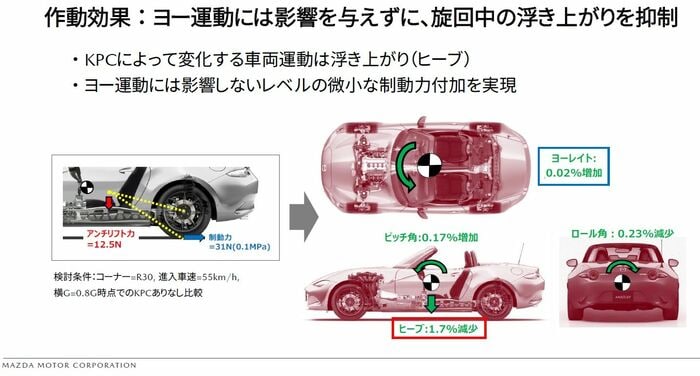
カーブで車体は外側へと①左右に傾きながら(ロールしながら)、路面の凹凸などを受けて②上下に浮き沈みしながら(ヒーブしながら)、③前後に揺れながら(ピッチングしながら)走る。
このうち、ドライバーや同乗者がもっとも不安(≒怖さ)を感じるは②のヒーブであるという。たしかにエレベーターの動き出しや停止直前のフワッと感じる上下方向の加速度変化はちょっと気持ち悪い。冒頭のジェットコースターはこのヒーブをスリルに変えて楽しむ乗り物である。
一方、クルマは感情のない工業製品なのでヒーブに対し怖さこそ感じない(当然だ!)が、車体がヒーブを受ければ程度の差はあれ確実に不安定になる。
KPCにはこのヒーブを押さえ込む、つまり車体を沈み込ませて落ち着かせる働きがある。カーブの走行時、左右の後輪に生じる車輪速差を起点にして、内側の後輪に緩いブレーキを掛けることで車体を安定させるのだ。