1/6 PAGES
2/6 PAGES
3/6 PAGES
4/6 PAGES
5/6 PAGES
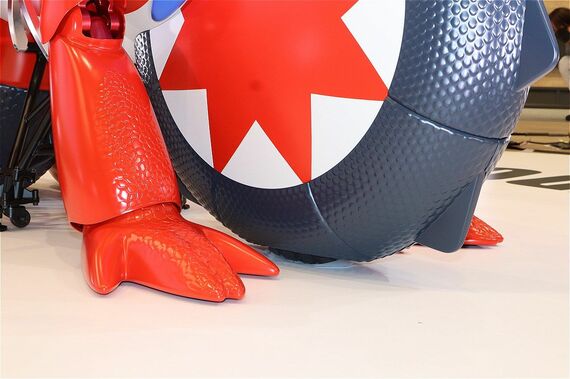
足元をよく見ると、タイヤがあることがわかる(筆者撮影)
つまり、ホンダコライドンは、基本的に2輪車と同じ走り方をするのだ。ただし、普通の2輪車と違うのは、発進から走行中はもちろん、停止中も自らバランスを取って、乗員が足を地面に着けなくても転倒しないことだ。ホンダが開発中の「ホンダライディングアシスト」という技術を応用することで、それを可能としている。
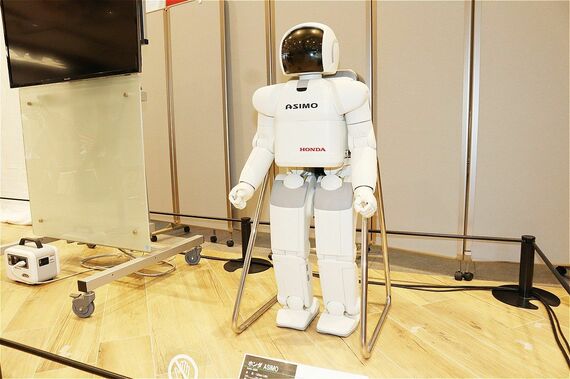
ホンダが開発した2足歩行ロボットのアシモ(筆者撮影)
ご存じのとおり、バイクはバランスを崩すと転倒してしまう乗り物だ。ホンダライディングアシストは、2輪車が持つそうした潜在的リスクへの不安を解消することを目的に、ホンダが開発している2輪姿勢制御技術だ。ホンダが製作したヒューマノイドロボットのアシモなどで培った独自の姿勢安定化技術を応用し、バイクが転倒しやすい停止中や極低速域で車体を安定させることが大きな特徴だといえる。
ホンダライディングアシストとは

ホンダコライドンに搭載した「ホンダライディングアシスト2.0」を採用したNM4の開発車両(筆者撮影)
もともとは、2017年にアメリカの電子機器関連見本市「CES」や「東京モーターショー」などで公開された技術だが、当初は前輪を前後左右に自動で動かし、バイクが停止状態を保ったまま自立し、極低速でのスムーズな旋回などを行った。
その後、2022年に、その改良版となるホンダライディングアシスト2.0を発表。前輪のみの制御だった従来型では、例えば曲がりたいときにシステムの介入が強すぎて、ライダーが違和感を持つ場合があったという。そこで、改良版の2.0では、車体と後輪の間に「車体・後輪揺動機構」を追加。車体後部にモーターを搭載し、リアタイヤと車体を左右にスイングさせることで、バランスを取る仕組みを採用したことで、より自然な制御を可能とした。
6/6 PAGES