当プロジェクトに関わる慶應義塾大学 大学院政策・メディア研究科の大前学教授によれば、実験中の自動運転バスは、「(あらかじめ作成した)高精度マップの情報と、GPSやLiDARが随時取得する情報により、自己位置推定を行う」システムを持つという。自己位置推定とは、自動運転車が、現在、決められたルート上の車道をきちんと走行しているかを、さまざまな情報を基に自ら認識するといった意味だ。この自己位置推定がうまくいかないと、自動運転車は「道をはずれて進んでいく」ことも多いそうで、GPSやLiDARからの情報は非常に重要だという。

ただし、GPSの情報は、山林やビルなどがある場所では入りづらい場合もある。大前教授によれば、「実際に大学構内のルート上でも、木々が茂っている場所ではGPS情報が入りにくい」という。また、その日の状況でもかなり変わる。「(木の手入れなどで)芝刈り機が動いていたり、不審な電波が出ていたりするときなどにも、正確なGPS情報を取得できない場合がある」という。
GPS情報が取得できない状況で効果的
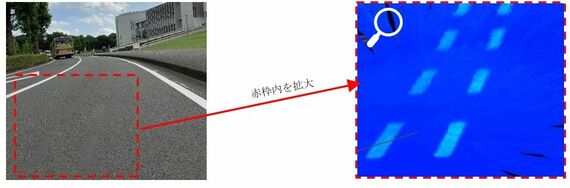
そして、そんなときに自動運転車の自己位置推定をより正確にしてくれるのが、ターゲットラインペイントだ。道路に塗った特殊な塗料をLiDARが検知し、まるで道路に敷いたレールの上を走るように、規定ルートを走行させることが可能となる。

しかも塗料は、道路のアスファルトに近い色にできるので、他車両のドライバーが誤認しづらく、混合交通時の安全性も高くなる。今回は、大学構内のみでの実施だったが、日本ペイント・インダストリアルコーティングスが実施した長崎県対馬市での実証実験では、市内の公道で実施し、基本的に問題はなかったという。

ちなみにシダックス、対馬市、明治大学などと共同で、2022年5月19~22日の4日間に実施した長崎県対馬市での実証実験では、自動運転仕様にしたトヨタ「エスティマ」を使用。GPSや高精度マップ、カメラなどは搭載せず、センサーはターゲットラインペイントを認識するLiDARのみとしたが、うまく規定ルートを自動運転し、大きなトラブルもなかったそうだ。
ほかにもターゲットラインペイントは、導入やメンテナンスのコストを削減できることもポイントだ。自動運転車の実証実験では、よく磁気マーカーや電磁誘導線などを走行ルート上の道路下に埋め込み、車両を誘導する仕組みもあるが、この場合は、大がかりな道路工事などが必要だ。一方、道路に塗るだけで実施できるターゲットラインペイントの場合、日本ペイント・インダストリアルコーティングスの試算によれば、「導入コストが半分以下、メンテナンスコストが1/5~1/10に削減できる」という。