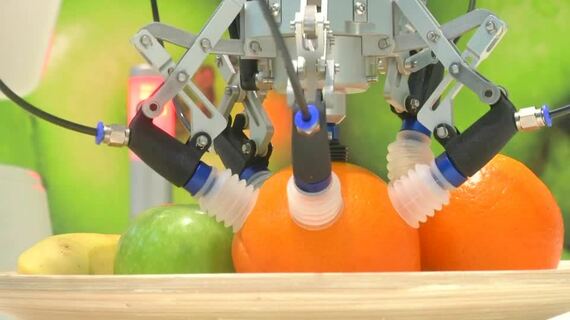
器用!果物を収穫するロボットアームの実力 タコ足のようなチューブが果物に吸い付く
このロボットアームは、果物を収穫するのに適切な時期を計算できるだけでなく、収穫する際には果物を傷つけない持ち方を判断することができる。
果物は非常に傷つきやすいため、収穫はいまだに人の手によって行われることが多い。だがこのロボットは、異なる種類の果物を見分け、傷つけずにつかんで運ぶことができる。
開発者のケンブリッジ・コンサルタンツによると、このロボットは、それぞれの果物の形にあわせて、最適な扱い方を考え出すという機能を備えている。
「従来のロボットは、決まった物を決まった場所で取り、別の位置へ運ぶといった同じ作業を繰り返すだけで、いまだにロボットの活用難しい場所や、用途がたくさんある。しかし、自然や環境のわずかな変化に対応できる能力をロボットシステムに組み込むことができれば、そういった場所・用途にも使えるようになる」と、ケンブリッジ・コンサルタンツの産業工学部門代表、クリス・ロバーツ氏は話す。
圧力のかけ方にコツ
このロボットアームには、マイクロソフトのキネクトイメージセンサーのような比較的安価なソフトウエアが使われており、物の大きさや形状に加え、色も識別することができる。
ロボットアームは直感的なアルゴリズムを用いて、果物の違いを認識し、収穫する順番を計算することが可能だ。かぎ爪のようなグリッパーには、多数のセンサーが搭載された真空チューブが使われており、果物を傷つけないように扱うことができる。
「果物をつかんでいるチューブのみを真空状態にすることで、果物にかかる圧力を分散し、果物が傷つくのを防ぎながらつかみ続けることができる。この圧力により、さらに重い果物を持ち上げることも可能だ」(ロバーツ氏)。
このロボットアームのような「スマート」なロボットは、今後さまざまな工業、商業分野の作業を変える可能性がある。これにより、人とロボットの連携も一段と進むだろう。
「人とロボットが連携するうえで障害になるのは、人は生産ラインのように規則的な動きをしないということだ。そのため、ロボット側が環境変化などに対応する必要があり、たとえば人がモノを動かした場合は、ロボットはその動きに対応できなければいけない」(ロバーツ氏)。
人とロボットが共同で作業できるのはまだ先になるかもしれない。しかし、高度な処理能力を持ったこうしたロボットの登場はその先への期待を抱かせる。